About
I am an Applied Scientist with a specialization in Robotics and
Autonomy. After completing my PhD in Aerospace Engineering
at UT
Austin I have been working with the Navigation team at Amazon Scout, an autonomous
sidewalk delivery robot delivering packages and groceries to the
suburban United States. I graduated from
UT Austin with a Masters in Mechanical Engineering and Bachelors from IIT
Bombay in Mechanical Engineering. I worked with Maruthi Akella and Renato Zanetti on control theory, nonlinear
estimation and robotics. My PhD research included Self Calibration
of Sensors and Machine Learning for Autonomous Lunar Landing.
Work Experience
Jun, 2021 onwards
Navigation Team working on motion planning, trajectory tracking,
using learning to enhance planning algorithms, robustness analysis,
hardware-in-the-loop testing of autonomous robots.
Applied Scientist Intern, Amazon Scout
Jun - Aug, 2020
Worked with the Navigation Team on collision detection and avoidance of the autonomous robot.
Jun - Sep, 2019
Worked with the Intelligent Automation team to enable automation and remote operation of oil field services.
Talks
- Dec 2018: Presented at the 57th IEEE Conference on Decision and Control, Miami, FL
- Aug 2018: Presented at the AAS/AIAA Astrodynamics Specialist Conference, Snowbird, UT
Recent Work
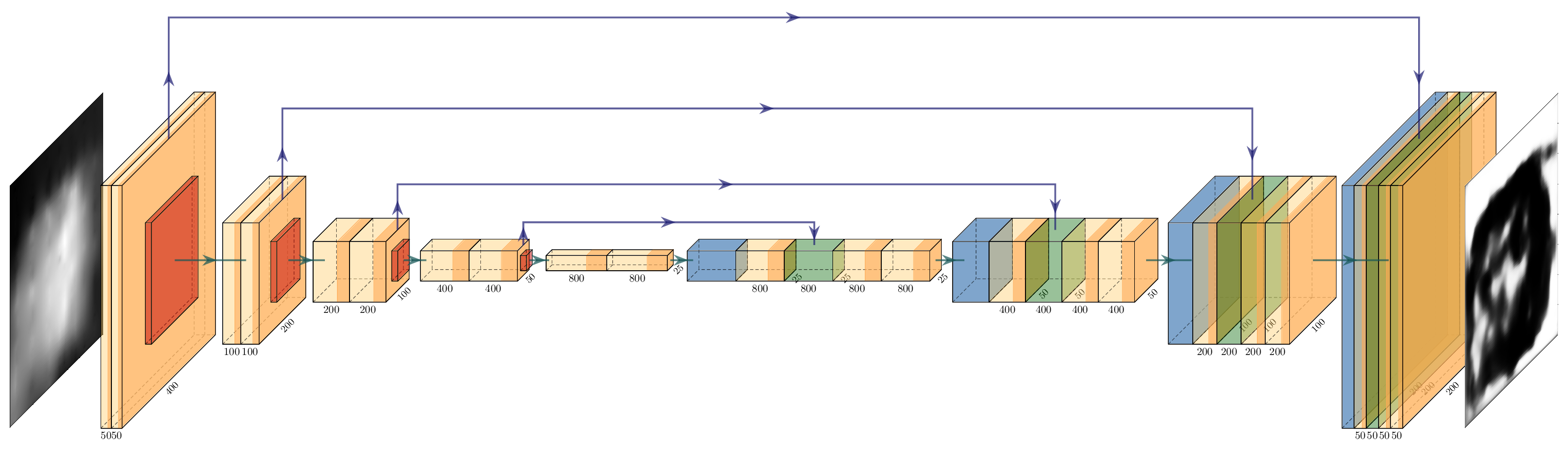
Semantic Segmentation for Autonomous Hazard Detection on the Lunar Surface
A real time machine learning based algorithm
for Hazard Detection on the lunar surface to be
deployed during the landing phase is presented.
A computer vision technique called Semantic
Segmentation is used to classify safe and
hazardous landing spots for the spacecraft.
Randomly sampled Lunar DEMs from the Lunar
Reconnaissance Orbiter mission of 2009 are used
to train, test, and validate the CNN. The
ground truth is calculated according the
mission requirements and use existing
techniques to calculate slope and roughness.
Data augmentation techniques are then used to
artificially create additional DEMs by
transforming the existing data set. This work
is accepted in the AIAA SciTech conference and
is to be presented in Jan 2020.
Rahul Moghe and Renato Zanetti
AIAA SciTech Conference 2020
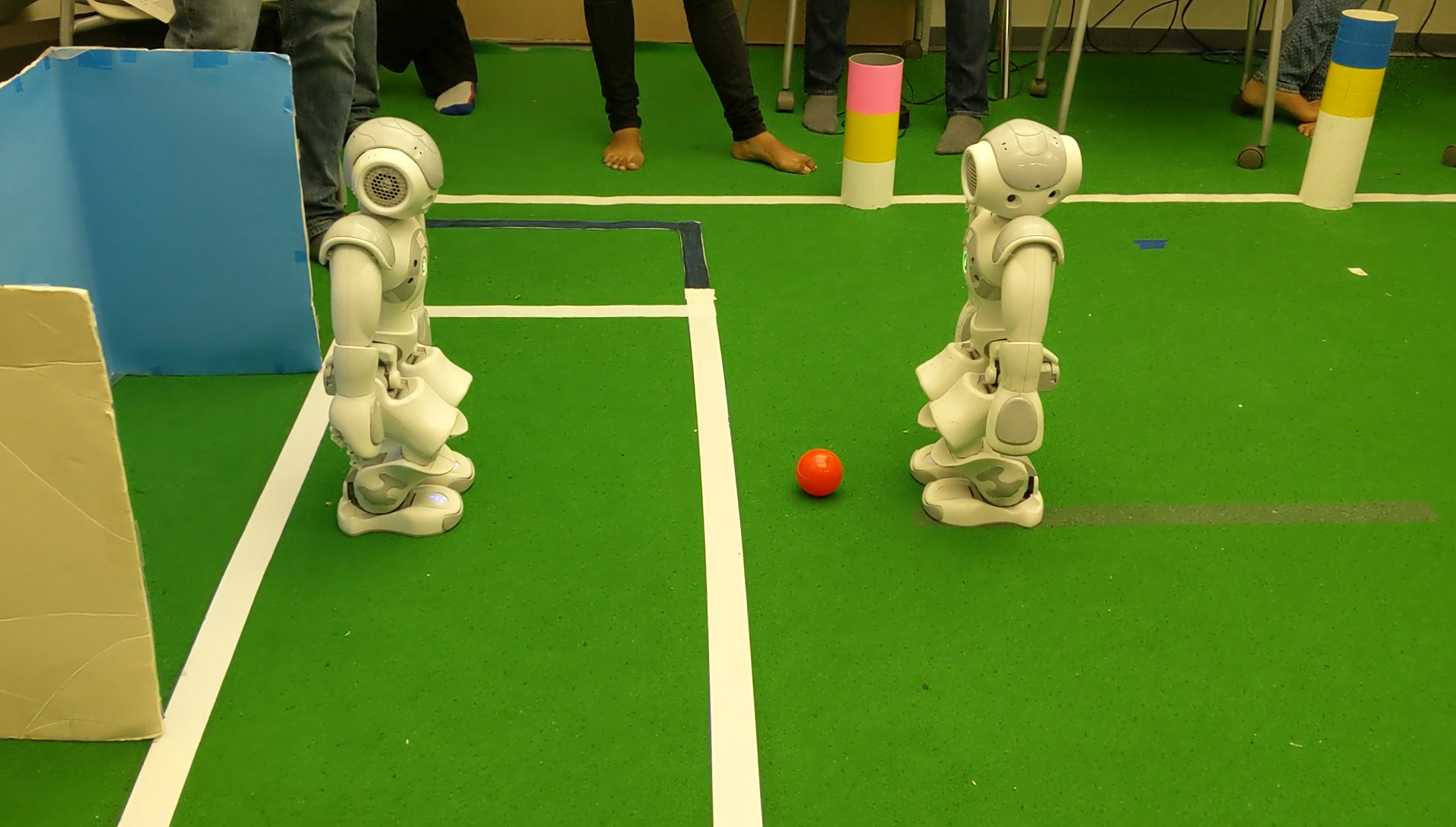
Robot Soccer
Set up the code base for the Aldebaran Nao
robot for perception and autonomous control.
Tasks included writing color segmentation, blob
formation and object detection, using Extended
Kalman filters for ball pose estimation and
Particle filters for localization. Also
formulated controllers for high-level behaviors
like aligning and walking to the ball on the
soccer field. Perform goalkeeping and shooting
actions with the robot. Stood fourth out of ten
teams in the penalty kick tournament held as a
part of the Autonomous Robots course.
Implemented the Complete Coverage D* Lite
algorithm for coverage path planning.
Soccer Video •
Project Report
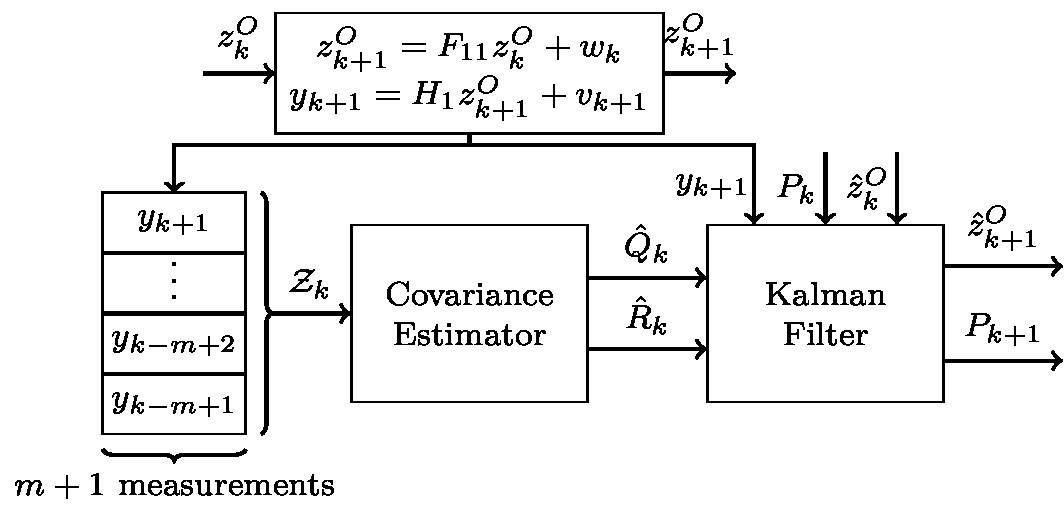
Covariance Matching Kalman Filter
Formulated a novel adaptive Kalman filtering
technique to estimate unknown elements in the
noise covariance matrices while simultaneously
estimating the state of the system. Provided a
comprehensive proof of convergence for the
filter under conditions of uniform
observability. The number of unknown elements
in the covarianec matrix decides depends on the
Rahul Moghe, Renato Zanetti and Maruthi R. Akella
IEEE Conference on Decision and Control (CDC) 2018
Paper
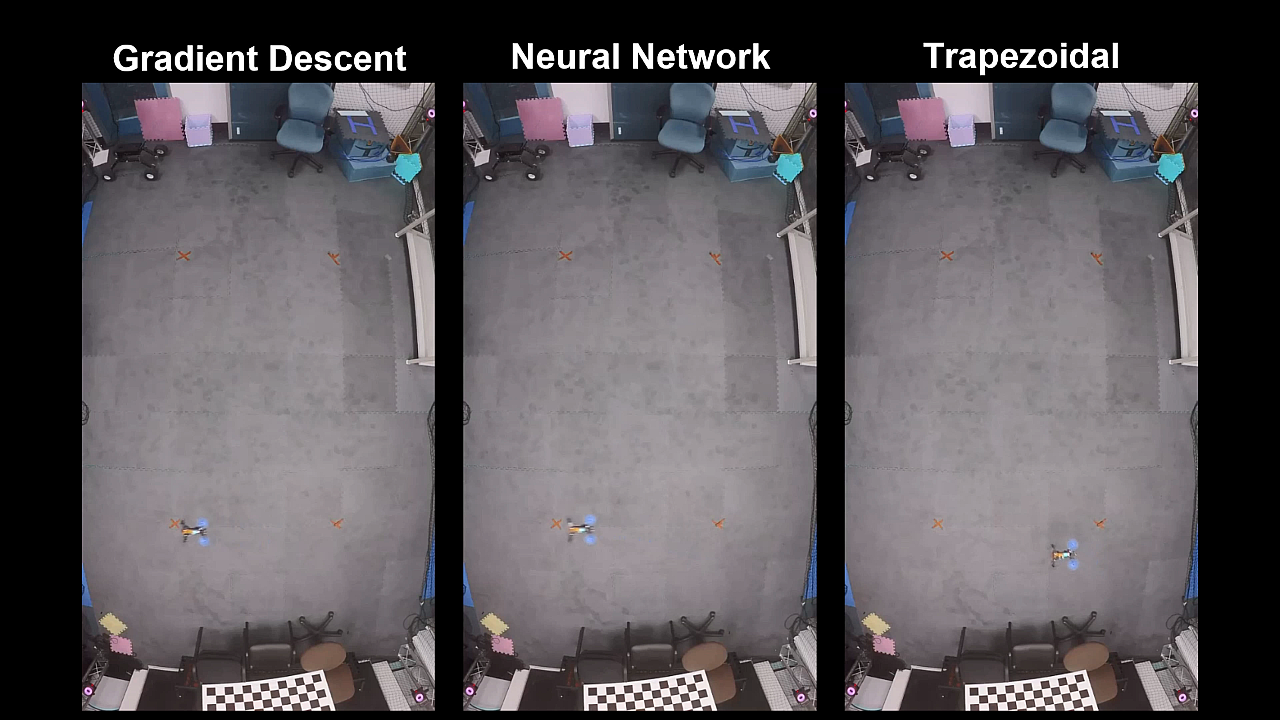
Minimum Snap Trajectory Planning
Developed a real time minimum snap algorithm
for Quadcopters using feedforward neural
networks. The optimal minimum snap algorithm
involves an expensive gradient descent
calculation and cannot be performed in real
time. Other techniques like the trapezoidal
velocity profile methods are far from
optimality. The networks trained using the
output from optimal gradient descent methods
result in a significant improvement in the
optimality of the trajectories found while also
allowing them to be generated in real time.
Marcelino M. de Almeida, Rahul Moghe, and Maruthi R. Akella
IEEE International Conference on Robotics and Automation (ICRA) 2019
Video
Paper
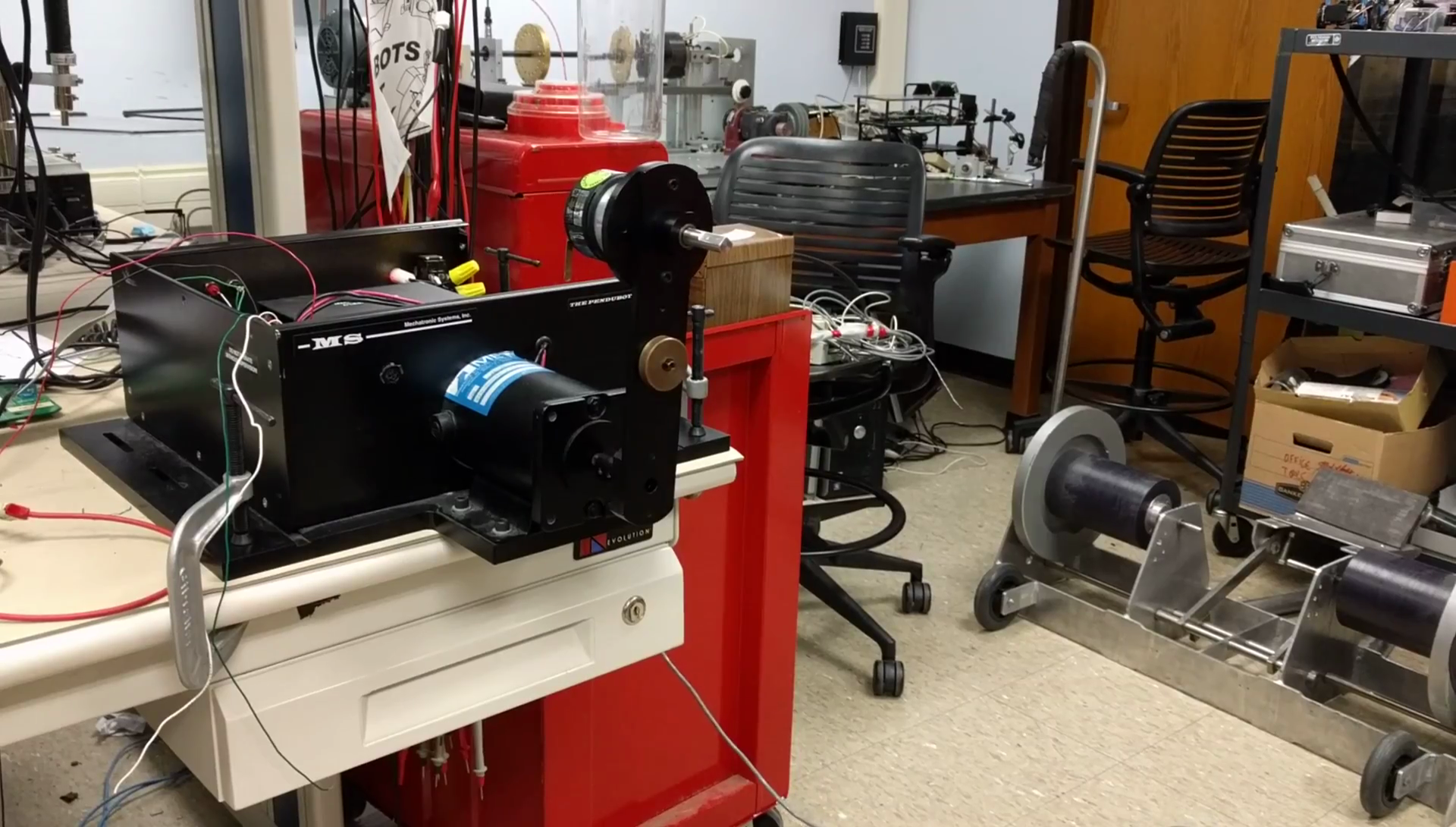
Variable Structure Controller for single pendulum
Designed a variable structure unstable energy controller for the single pendulum with angular feedback. Performed system identification to estimate the parameters of the motor by collecting data and applying regression techniques. The controller involved a unstable energy component which destabilized the pendulum from its bottom position. As the pendulum approached the top position a PID controller was used to maintain in at the top position. The PID controller was tuned using Ziegler Nichols tuning method and implemented the controller on the hardware.
Video •
Code (GitHub)